The suction frame assembly depends on the required speed (case per minute), this includes the choice of used sensors as well the location of the sensors. The movement of the suction frame is initiated with an air cylinder or a motor. Two reed switches (or a home sensor and an encoder) check the end positions (home and forward). A watchdog is timing the movement of the suction frame for both versions.
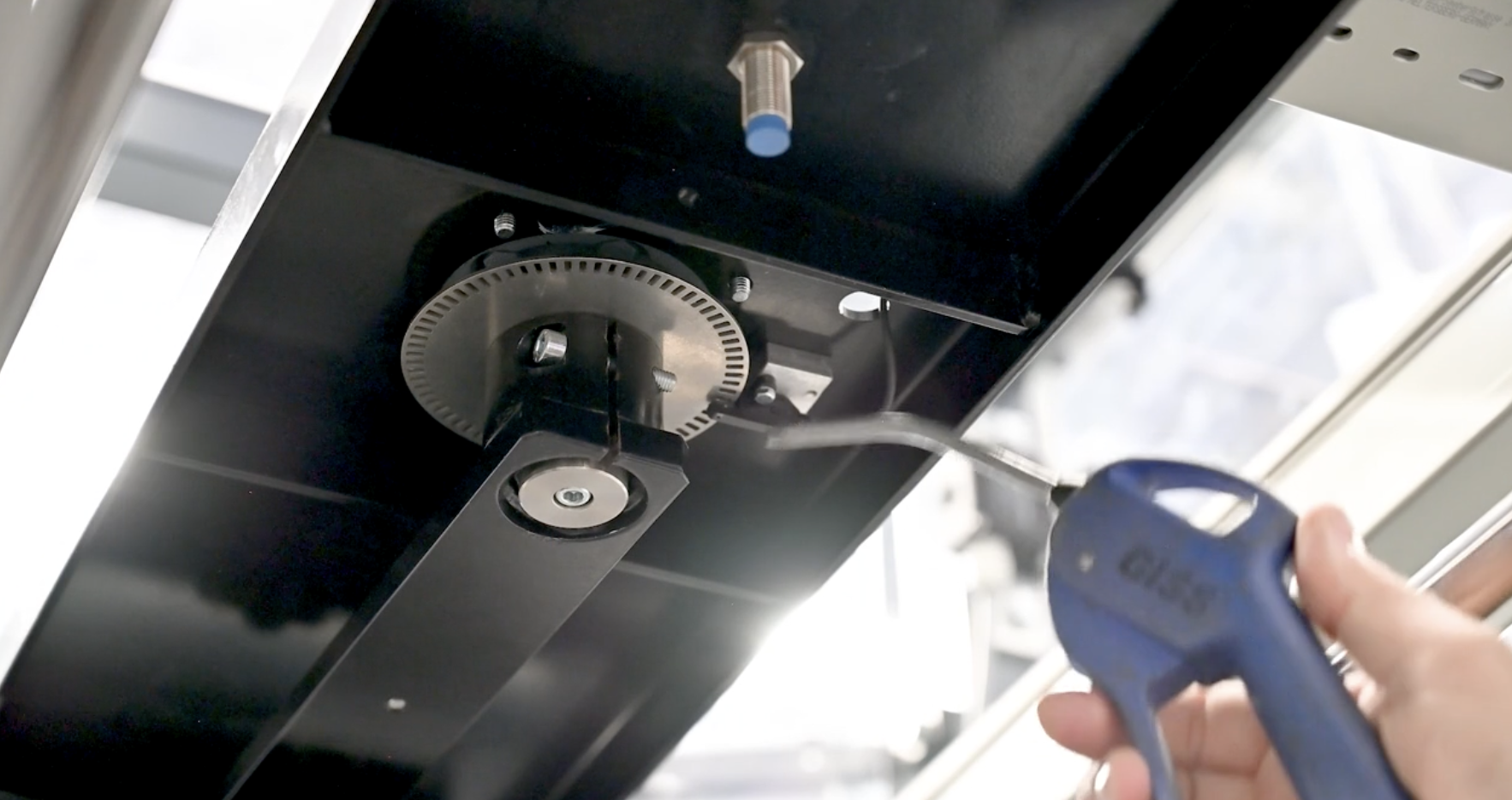
For a motor driven suction frame, one complete rotation is equal to 72 pulses. Depending on the capacity, the suction frame is speeding up and slowing down at a certain position. The suction frame can run with 8 different speeds. Depending on the capacity we select the required speed to maintain the correct capacity.
One rotation contains 4 different speeds:
Fast towards magazine
Slow at magazine
Fast to home position
Slow at home position